
Přijímače Duplex řady REX Assist
V těchto dnech by se na pultech modelářských obchodů měla začít objevovat nová řada přijímačů firmy JETI model s velkým A v názvu. To velké A znamená „Assist“ a Assist znamená, že tyto přijímače mají integrovaný stabilizační systém.
Snahy o nejrůznější stabilizátory letu existovaly již v modelářském pravěku. Pamatuji, jak jsme jako kluci vymýšleli s větším či menším neúspěchem různá mechanická „udělátka“ k jednokanálovým vysílačkám. Tehdy to bylo z nedostatku jiných možností a mladické nerozvážnosti, nyní jsou důvody jiné. Ani sebelepší pilot nedokáže reagovat tak rychle, ani tak přesně, jako dobrý stabilizační systém na palubě modelu. Po vzniku odchylky v dráze letu modelu ji musí pilot nejprve zaregistrovat, pak zpracovat ve svém centrálním bioprocesoru, ten musí vyslat signál do rukou, ty pohnou kniplem na vysílači, pak další procesory, výpočty a nakonec se pohne páka serva. To už je ale model o kousek jinde. Naproti tomu funkční a seřízený stabilizační systém reaguje korekcí již během vzniku této odchylky. Již v základním nastavení dokáže udělat z modelu typu vzteklý teriér klidného bernardýna, virtuálně posunou těžiště dopředu, nebo přepnutím jednoho vypínače vypnout nárazový vítr.
Začalo to mechanickými gyroskopy pro vrtulníky. Vy zkušenější (neříkám starší, protože jsem už taky dost „zkušený“), si jistě vybavíte, jak jsme sledovali většinou autodestrukční pokusy o lety s prvními vrtulníky bez gyra, a na rozdíl, když tito rotoroví průkopníci osadili své báječné stroje prvními mechanickými jednoosými gyroskopy se setrvačníkem. Vývoj jde rychle kupředu a tak máme díky nástupu GPS, rozvoji mobilních telefonů, a bohužel i vojenským aplikacím, k dispozici miniaturní gyroskopy, akcelerometry, barometrické výškoměry a magnetometry s citlivostí a přesností dostatečnou pro vesmírné lodě Federace.
Díky rozvoji mikroelektroniky a dostupnosti čidel je dnes základem všech stabilizačních systémů tříosý gyroskop a tříosý akcelerometr. Gyroskopy měří rotační zrychlení kolem jednotlivých os a z těchto údajů systém vypočítává změnu polohy v prostoru. Akcelerometry měří zrychlení ve směru dané osy a z těchto údajů se vypočítává intenzita, tedy rychlost, této změny. Společně poskytují informace o tom, v jaké poloze model je, kam se pohybuje a s jakým zrychlením. Kvalitní dražší systémy jsou vybaveny také například magnetometrem, tedy elektronickým kompasem, GPS senzorem pro zjišťování zeměpisné polohy a Pitotovou trubicí, která měří rychlost proudění vzduchu kolem modelu. Zkoušel jsem různé systémy a podle mě kvalita, množství a přesnost čidel není pro výsledek nejdůležitější. Více se dá pokazit špatným vyladěním stabilizace uživatelem, ale zásadní je kvalita programu pro zpracování informací z čidel. Získat informace o poloze a pohybu modelu je dnes jednoduché. Zpracovat je a nastavit stabilizaci tak, aby výsledná reakce modelu byla správná, již tak jednoduché není. Často si někdo koupí stabilizační systém, nastaví základní citlivost, smysl výchylek, a hurá do vzduchu. Jistě, nějak se to hýbe, něco to dělá, ale je to jako lít do Porsche bionaftu. Existuje jednoduchý test pro ověření toho, jak si konkrétní typ modelu rozumí se stabilizací a jestli ji máme dobře vyladěnou. Vytrimovaný model uveďte do přímého rovnoměrného letu, vychylte směrovku zhruba na 60% – 80% výchylky a držte páku směrovky v této poloze. Dobrý a seřízený stabilizační systém by měl model udržovat v rovném kruhu s křídly v horizontu, ve stabilní výšce a to bez pilotova zásahu do ostatních řídících ploch. Vypadá to jednoduše, ale hodně stabilizačních systémů tuto zkoušku nezvládne. Jak se s tímto poprali ve firmě JETI model je tématem tohoto článku.
Práce na systému Assist začaly někdy před 18 měsíci. Tehdy bylo rozhodnuto, že se nejprve bude pracovat na nové řadě přijímačů s vestavěným stabilizačním systémem a později na samostatném systému bez vlastního přijímače. U obou variant je nutné k ovládání modelu používat některý z vysílačů nebo vysílacích modulů Duplex. Každá z možností má své klady i zápory. Stabilizační systém vestavěný do přijímače má nejjednodušší instalaci, jelikož se žádná nekoná. Je kompaktní a nezabírá v modelu žádné místo navíc. Nevýhodou je, že je nutné umístit přijímač ideálně do těžiště modelu nebo blízko něj. A to není vždy možné. Dále není možné použít jako dodatečné čidlo magnetometr, tedy elektronický kompas. Toto čidlo je citlivé na změny magnetického pole. Ale magnetické pole vytváří i vodič, kterým prochází proud a těch je každý přijímač a jeho okolí plný. Z těchto důvodů je přijímač s integrovanou stabilizací vhodný spíše do modelů s méně prostorným trupem, typicky větroně nebo pěnové modely. Ale i do velkých modelů existuje řešení, jak uvidíme o kousek níže.
Samostatný stabilizační systém je vhodnější pro instalaci do větších modelů. Je malý a tak se v těžišti či jeho okolí pro něj vždy najde nějaké místo. Vlastní přijímač pak můžeme umístit tam, kde je to nejvhodnější vzhledem ke kabeláži, přístupnosti, napájení a podobně. Nevýhodou samostatných stabilizačních systémů bývá spousta kabeláže a konektorů navíc a hlavně nutnost jeho vřazení mezi přijímač a serva. To snižuje míru spolehlivosti celého systému a samozřejmě jakákoliv závada samostatné stabilizace vložené mezi přijímač a serva většinou odstaví některé z životně důležitých serv. V Příboru šli jako obvykle svou cestu. Samostatný stabilizační systém obsahuje pouze čidla a obvody pro základní zpracování dat. Ty jsou vedeny jako data běžným třížilovým kabelem do normálního přijímače nebo Central Boxu. Mezi přijímač a serva tedy nic nevkládáme a při případné závadě stabilizace model normálně řídíme dál. Pro takovou stabilizaci lehce najdeme optimální místo instalace bez kompromisů, a pokud kolem něj nepotáhneme silové vodiče, může takové zařízení obsahovat i užitečný magnetometr. Takový stabilizační systém je ideální pro velké modely a již se na něj těším. Má však i jednu velkou nevýhodu, předpokládaný termín dostupnosti je někdy kolem léta 2018.
Ale dost o tom, co bude, pojďme se podívat na to, co již je.
Jak jsem psal, vývoj nové řady přijímačů začal asi před 18 měsíci a testování první ověřovací série přijímačů typu REX 10A v reálném provozu asi před sedmi měsíci. Nyní je po četných úpravách a ladění hotova komerční verze firmware s označením 1.07, se kterou je celá řada Assist distribuována. V první nabídce je šesti, sedmi, deseti a dvanáctikanálový přijímač. V tabulce č. 1 jsou uvedeny jejich základní vlastnosti.
Tabulka 1: přehled a vlastnosti aktuálně dostupných přijímačů řady Duplex REX Assist
| typ |
hmotnost (g) |
rozměry (mm) |
počet kanálů přímých/EXBus |
počet stabilizovaných kanálů |
pracovní teplota (oC) |
napájecí napětí (V) |
citlivost dBm |
cena s DPH |
| REX R6A |
11 |
38x25x11 |
6/24 |
16 |
-10 až +85 |
3,5 – 8,4 |
-106 |
3 320 Kč |
| REX R7A |
13 |
42x28x11 |
7/24 |
16 |
-10 až +85 |
3,5 – 8,4 |
-106 |
3 700 Kč |
| REX R10A |
16 |
51x28x11 |
10/24 |
16 |
-10 až +85 |
3,5 – 8,4 |
-106 |
4 460 Kč |
| REX R12AEPC |
24 |
51x28x11 |
12/24 |
16 |
-10 až +85 |
3,5 – 8,4 |
-106 |
5 100 Kč |
Všechny přijímače jsou s plným dosahem, je možné je použít i ve funkci satelitního přijímače se stabilizací, mají vysoký rozsah pracovní teploty a napájecího napětí, podporují přenosový protokol EX Bus, který poskytuje plných dvacetičtyř kanálů a může přenášet i data stabilizace. Takže i s šestikanálovým přijímačem propojeným datovou linkou EX Bus například s některým z Central Boxů máme k dispozici plný počet dvacetičtyř nestabilizovaných nebo šestnáct Assistem stabilizovaných proporcionálních kanálů.
Přijímače řady Assist vycházejí z řady REX. Vlastně se jedná o přijímače starší řady REX doplněné o obvody a funkce stabilizačního systému. Na obr. 1 jsou pro porovnání přijímače REX10A Assist, Rex12A Assist a REX12 bez stabilizačního systému.

obr. 1: porovnání přijímačů Rex10A, Rex12A a Rex12
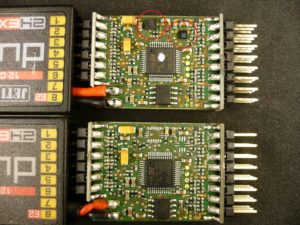
obr. 2 zadní strana desky přijímače REX12A (nahoře) a REX12 (dole). Červeným kroužkem je označen tříosý akcelerometr s gyroskopem a senzor atmosférického tlaku
Na obr. 2 pak zadní strana desky přijímače REX12A Assist (v horní části) a REX12 bez stabilizace (dole). Jak vidíte, jedná se o totožné desky se stejnými součástkami se dvěma rozdíly. Červeným kroužkem jsou označeny čidla stabilizačního systému. Nalevo se jedná o nový typ tříosého gyroskopu a tříosého akcelerometru firmy ST Microelectronics. Žasnu, jak rychle jde vývoj v tomto oboru kupředu. Mé první jednoosé gyro vážilo 120 g, bylo velké jako dětská pěst, a to byla pouze část bez elektroniky. Zde je také mechanicko – elektrické gyro, tedy i v něm jsou mechanické pohyblivé součástky. Je ale tříosé, s akcelerometry, základní elektronikou a s rozměry pouzdra 2,5x3x0,85 mm! Neuvěřitelné!
Druhá zakroužkovaná součástka je senzor atmosférického tlaku, který poskytuje systému informace o výšce a stoupání či klesání, čili vario. V aktuální sériové produkci není Vario a výstup výšky podporován jako dostupné telemetrické data. Výstup z barometrického senzoru je však zahrnut do výpočtů a stabilizace jej využívá pro zpřesnění změny polohy modelu. Jedná se opět o poslední model senzoru stejného výrobce s vysokou citlivostí, takže systém rozlišuje výšku s přesností na 10 cm. Pokud někdo chcete provozovat přijímače Assist i s vědomím možné ztráty záruky bez krabičky, věnujte pozornost této součástce. Šedé okénko na jejím pouzdře je membrána citlivá na tlak a mechanické poškození. Také světlo může zkreslit měřené hodnoty, takže do černé smršťovačky!
Programové vybavení přijímačů je možné rozdělit do dvou částí. Nová a výrazně obsáhlejší část patří k nastavování a optimalizaci funkcí stabilizačního systému. Obsahově menší část je téměř identická s klasickou řadou přijímačů REX a nastavují se zde základní vlastnosti přijímače, jako klasický Fail-Safe (později se podíváme i na zajímavé možnosti novinky firmy – aktivního Fail-Safe), alarmy, typ PPM modulace, výstupní perioda, alternativní konfigurace výstupů a LED pásek. U posledních dvou bodů bych se rád zastavil. Systém Duplex je postupem času a nabídkou stále nových možností nutně obsáhlejší a tím se zdá i komplikovanější. Tak je tomu i u alternativních možností servovýstupů. Dříve jsme byli zvyklí, že sem prostě připojujeme serva. To již není úplně pravda. Servovýstupy jsou nyní rozděleny do několika skupin a každá má několik funkcí. Vhodnější název než servovýstupy by tedy byl programovatelné multiporty. Zdá se to komplikované, ale opak je pravdou. V tabulce č. 2 je přehled možností jednotlivých výstupů a je na nás, co od přijímače požadujeme a do jaké funkce si výstup přepneme. Na obr. 3 pak příklad možností nastavení. Zde je konkrétně výstup jedna a dva nastaven pro připojení serva, trojka jako digitální výstup (ten používám například pro přímé připojení pozičního osvětlení modelu), do čtyřky patří servo ovládající otáčení kamery, a pětka je nyní nastavena pro připojení pásku svítivých diod.
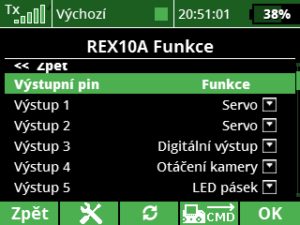
obr. 3: příklad možností nastavení výstupů
Tabulka 2: popis funkcí pevných i programovatelných výstupů přijímačů řady Assist
|
REX 6A |
REX 7A |
REX 10A |
REX 12A |
|
|
Pin 1 |
Y1 |
Y1 |
Y1 |
Y1 |
|
Pin 2 |
Y2 |
Y2 |
Y2 |
Y2 |
|
Pin 3 |
Y3 |
Y3 |
Y3 |
Y3 |
|
Pin 4 |
Y4 |
Y4 |
Y4 |
Y4 |
|
Pin 5 |
Y5 nebo E1 |
Y5 nebo LED |
Y5 nebo LED |
Y5 |
|
Pin 6 |
Y6 nebo E2 |
Y6 nebo E2 |
Y6 |
Y6 |
|
Pin 7 |
Ext. |
Y7 nebo E2 |
Y7 |
Y7 |
|
Pin 8 |
Ext. |
Y8 nebo E2 |
Y8 nebo E2 |
|
|
Pin 9 |
Y9 |
Y9 |
||
|
Pin 10 |
Y10 |
Y10 |
||
|
Pin 11 |
Bat. |
Y11 |
||
|
Pin 12 |
Bat. |
Y12 nebo LED |
||
|
Pin 13 |
E1 |
E1 |
||
|
Pin 14 |
Ext. |
Ext. |
vysvětlivky:
Y1-Y12: tyto výstupy mohou být uživatelem přepnuty do funkce běžného výstupu pro servo, digitálního vstupu, digitálního výstupu, u multikoptér pro řízení až osmi motorů, řízení klonění kamery, klopení kamery nebo otáčení kamery
E1, E2: možnost připojení Jetiboxu a telemetrických senzorů, PPM vstup nebo PPM výstup, digitální vstup nebo výstup, dvacetičtyř kanálový výstup komunikačních protokolů EXBus či UDI, podpora až 8 motorů u koptér, klonění kamery
Ext.: místo pro připojení Jetiboxu a telemetrických čidel
LED: na tyto výstupy je možné přímo připojit LED pásky pro osvětlení modelu
Bat.: připojení napájecích akumulátorů
V možnostech nastavení nově přibyla položka LED. Po přepnutí příslušného výstupu do této volby k němu můžeme přímo připojit pásek vysocesvítivých LED diod, například pro noční létání nebo zvýšení čitelnosti polohy modelu. A jak na to? Koupíme si LED pásek typu WS2812. Nůžkami z něj odstřihneme potřebný kus s minimálně jednou a maximálně třiceti dvěma LEDkami. K pásku připájíme běžný třížilový servokabel a ten zasuneme do příslušného výstupu přijímače. Pásek je samolepicí, takže jej přilepíme na model. Na obr. 3 je jeden takový půlmetrový doma vyrobený kousek. Konkrétně tento má 15 LED.

obr. 4: půlmetrový LED pásek
No a teď již zbývá jen nastavit, co má která LED dioda v pásku dělat. To nastavíme pro každou jednotlivě podle chuti a naší představy podle obr. 5. V nabídce jsou různé možnosti nastavení, každá z LED může svítit různými barvami, mohou barevně zobrazovat aktivní letový režim, oranžovým blikáním zobrazovat náklon modelu doprava či doleva, a podobně. Fantazii se meze nekladou a třicet dva různobarevných LED diod již dokáže z modelu udělat solidní létající vánoční stromeček.

obr. 5: nastavení jednotlivých LED v pásku
Pozor ale na napájení! Tyto LED pásky mají povolené napětí 5V. Přímo je tedy můžeme připojit jen v případě, kdy máme palubní napětí kolem pěti voltů. Při napájení serv dvěma Lixx články musíme napětí pro LED pásky snížit vhodným stabilizátorem napětí. LED diody svítí opravdu intenzivně, a proto si vezmou i svůj díl energie. Euforie z nově osvětleného modelu by po přetížení BECu mohla rychle přejít do smutku. Proto se přesvědčte, že máte napájení přijímače dostatečně dimenzované a poradí si se zvýšenou spotřebou. Stejné upozornění, a na to se často zapomíná, platí i obecně pro stabilizační systémy. S aktivní stabilizací pracují serva daleko intenzivněji a téměř se nezastaví. Musí poslouchat nejen povely pilota ale i stabilizace, a to znamená zvýšený odběr energie z napájení. Takže akumulátory se vybijí dříve, a co bylo doposud na hranici možnosti BECu, může být po aktivaci stabilizace za ní. A v obou případech by mohlo dojít k nějakému nechtěnému nedorozumění mezi modelem a zeměkoulí.
A zde se pomalu dostáváme k nejdůležitější části – programovému vybavení, nastavování a vlastnostem stabilizace. V Jeti na to šli svým osvědčeným postupem. Řekli si: „Podíváme se, jak to dělají jinde ve světě a uděláme to lépe“. Jak se to povedlo, musíte posoudit vy. Při popisu a hodnocení se zaměřím hlavně na odlišnosti Assistu od jiných stabilizačních systémů a zcela vynechám obsáhlou část související s koptérami. Ne že bych tuto kategorii neměl rád, ale prostě tomu nerozumím.
Instalace přijímače v modelu
Přijímač by měl být umístěný v modelu co nejblíže k těžišti rovnoběžně s letovými osami. Po jeho instalaci je nutné v přehledném grafickém menu zadat stabilizačnímu systému, kterou z osmi možných poloh jsme zvolili (obr. 6).

obr. 6: nastavení polohy přijímače v modelu
Ne vždy je možné umístit přijímač do těžiště modelu. Pak musíme zvolit kompromisní řešení a u os, které budou mít vlivem posunutí zařízení sníženou citlivost, ji zvýšit ručně. Tvůrci Assistu s tímto počítali a systém umožňuje měnit citlivost každé ze tří os samostatně. Příklad takové kompromisní montáže je na obr. 7.

obr. 7: montáž přijímače REX12A v MIGu21
Z důvodů přístupnosti a nedostatku místa poblíž těžiště, kde jsou přednostně nádrže, jsem musel umístit přijímač se stabilizací výrazně před těžiště. Proto bude citlivost gyroskopů a akcelerometrů nižší na výchylky směrovky a výškovky, ale na křidélka zůstane stejná. V takovém případě je vhodné toto nedoporučené umístění přijímače kompenzovat změnou nastavení zisků jednotlivých os, například podle obr. 8. „Zisk stabilizace“, tedy proporcionální míra intenzity s jakou stabilizace zasahuje do řízení, a „držení směru“, jsou u položek „výškovka“ a „směrovka“ vyšší, než u položky „křidélka“.

obr. 8: nastavení zisku jednotlivých os
Na tomto obrázku jsou vidět i další dvě zajímavé volby. V menu „Držení směru“ nastavujeme, jak urputně má model držet směr letu po zamknutí polohy. S dobře nastavenými hodnotami tohoto menu je například kroužení v termice, průlety nebo visení na vrtuli vedlejší činností během rozhovoru s kamarády. Druhou, u jiných systémů neznámou novinkou, je volba nastavení 3D akrobatického faktoru. Zní to dost nesrozumitelně, ale v podstatě se jedná o jakési expo stabilizace. Můžeme zde nastavit, že při malých výchylkách páky stabilizace výrazněji zasahuje do řízení, a naopak, při velkých výchylkách se s námi přetahuje o vládu nad modelem a nesnižuje jeho akrobatické možnosti. Velmi užitečná funkce. Ale zpět k základnímu nastavení.
Základní nastavení pomocí „Průvodce“
Modelářská elektronika nám poskytuje stále více funkcí a možností, a tím se pro člověka, který „nedrží krok“, může stávat nepřehlednou. Tvůrci Assistu si toho jsou vědomi a po spárování a otevření menu přijímače nás přivítá nový „Průvodce“. S ním si připadáte jako na prohlídce nového domu, kde vás průvodce provádí postupně místnostmi, tedy logicky řazenými okny programu, v každé nabízí seznam možností a vyzve vás k výběru jedné z nich. Na konci takové procházky pak máte hotový a nastavený model. Pro představu na obr. 9 uvádím tři z osmi oken průvodce s krátkým popisem, ostatní jsou obdobná.
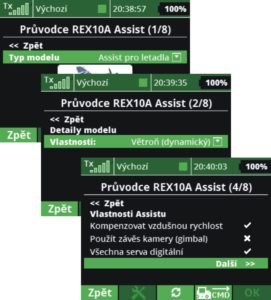
obr. 9: základní nastavení
V prvním okně zadáváme typ modelu, tedy letadlo nebo koptéru. U koptéry se nás průvodce zeptá i na typ rámu a počet motorů. Po volbě se nám vždy pro kontrolu zobrazí obrázek naší volby. V druhé ukázce okna následuje volba typu letadla. Zde jsou již z výroby přednastavená a co nejvíce optimalizovaná nastavení citlivosti gyroskopů a akcelerometrů pro jednotlivé typy modelů. Máme na výběr obecný model letadla, rychlý nebo termický větroň, cvičný model, polystyrenový model, malý akrobat, model pro přesnou akrobacii, model pro 3D akrobacii a poslední je má oblíbená volba, proudový model.
V posledním ukázkovém okně můžeme povolit kompenzaci rychlosti, tedy přikázat stabilizaci, aby si získávala informaci o rychlosti z pitotky nebo GPS senzoru, a zahrnula tuto informaci do výpočtů. To je velmi důležité při stabilizaci visení na vrtuli a příjemné u modelů s velkým rozsahem rychlostí. Také zde můžeme aktivovat řízené a stabilizované závěsy kamery a zadat, zda máme v modelu digitální či analogová serva, a jak rychlá. To je také velmi důležitá volba, jelikož některé stabilizační systémy neumí pracovat s pomalejšími servy, a to je například u velkých modelů, kde je důležitější síla a robustnost serva než jeho rychlost, problém.
Průvodce je prima, ale je třeba si uvědomit, že na konci máme sice nastavený, ale ne vyladěný model. Pokud se s tím spokojíme, můžeme jít létat. Pokud chceme využít všechny možnosti systému a vytěžit jeho výhody naplno, nezbývá než vzít návod a vyrazit seřizovat stabilizaci na letiště. Když už jsme u toho návodu, má hrozivých šedesát stránek, ale je logicky členěný a přehledný. Velkou část zabírá grafika a vysvětlování, jaký vliv mají konkrétní volby a funkce na chování modelu. A to je příjemná změna k lepšímu. Jediné, co bych asi návodu vytkl je, že je společný pro letadla i koptéry. Řekl bych, že by pro přehlednost a srozumitelnost bylo lepší jej rozdělit.
Letové režimy
Tato volba má trochu matoucí název. Nejde totiž o, tak jak jsme zvyklí, letové režimy modelu, ale letové režimy stabilizace. V tomto menu nám systém nabídne seznam možných letových režimů, ze kterých si můžeme jeden až tři vybrat a jejich volbu přiřadit k některému přepínači vysílače. Volit můžeme z těchto možností:
- Manuální: aktivací této volby jsou všechny stabilizační funkce vypnuty a model plně ovládá pouze pilot
- Trénink: tento režim je vhodný pro výuku létání nebo seznámení se s novým modelem. V rovném letu stabilizace nezasahuje nijak do řízení, pokud dosáhne úhel náklonu v některé z os povolenou hodnotu, brání stabilizace dalšímu náklonu. S modelem tak není možná akrobacie, ale také se nedostane do krizových situací.
- Normální: základní režim, takzvaný vypínač větru. Je vhodný pro nestabilní modely, létání v turbulentním prostředí, pro starty a přistání, pro makety. Model sice zklidní, ale neomezuje jeho akrobatické vlastnosti.
- Zamknutí: po aktivaci se stabilizace snaží udržet konstantní směr letu. Je vhodný pro visení na vrtuli, nožové lety, průlety a podobně. S tímto režimem umím viset i já a navíc s modelem, který bez něj není visení schopen.
- Horizont: tento režim je vhodný například pro začátečníky nebo první lety nového modelu. Stabilizace jen minimálně nebo vůbec nezasahuje do řízení. Pokud ale pustíme páky do neutrálu, model se plynule srovná do horizontálního letu.
Zajímavostí, a u jiných systémů neznámou věcí je, že každý z těchto režimů má vlastní nastavení citlivosti, dokáže stabilizovat až šestnáct kanálů a všechny jsou volně nastavitelné. Můžeme například zadat, která serva v modelu mají být stabilizovaná a kterou z funkcí stabilizace. To nám dává velkou kombinaci možností. Například při startu můžeme nechat aktivní pouze stabilizaci směrovky a touto funkcí nechat stabilizovat také přední kolo. Pro přistání můžeme ke směrovce a přednímu kolu přidat stabilizaci křidélek a aerodynamické brzdy, při kroužení v termice můžeme například ke stabilizaci výškovky jemně přidat křidélka nebo vztlaky. Možnosti jsou téměř neomezeny.
Inteligentní Fail-safe
Toto je jedna z mnoha dalších „duplexovin“, tedy funkcí, které u jiných systémů nenajdete. Klasický Fail-safe známe jako funkci, která po ztrátě signálu nastaví polohu serv do předem nastavené výchylky. Aktivní Fail-safe Assistu vezme polohu zadanou v klasickém Fail-safe jako základní a tuto se snaží aktivně, tedy výchylkami řídících ploch, udržet. Může se aktivovat ztrátou signálu nebo nuceně, přepínačem na vysílači. Důležité je, že i pokud aktivujeme tento nový Fail-safe přepínačem, model s vysílačem stále udržuje spojení, komunikuje a předává telemetrii. Po jeho deaktivaci okamžitě a bez prodlevy naskočí plně funkční ovládání modelu. Pokud nastavíme do klasického Fail-safe, že se má po ztrátě signálu vypnout motor, lehce natáhnout výškovka a lehce vychýlit směrovka, ještě to neznamená, že bude model pomalu sestupovat v kruzích k zemi. S aktivním Fail-safe ano a to i v případě, pokud bude aktivován třeba při letu na zádech. Pokud máme zapnutý aktivní Fail-safe, ten nejprve uvede model nuceně do horizontální polohy, a potom s ním začne kroužit a sestupovat. Přitom aktivně řídí model nejen směrovkou a výškovkou, ale všemi stabilizovanými plochami. Zde je jeden asi neplánovaný, ale zajímavý příklad využití aktivního Fail-safe. Pokud například u modelu větroně do klasického Fail-safe uložíme polohy serv odpovídající seřízení modelu pro kroužení v termice a aktivujeme nový aktivní Fail-safe, začne model krásně plynule zatáčet a sám se bude aktivně snažit udržovat v termickém kroužení. Zkoušel jsem a funguje to. To jsem zvědavý, jak se s touto funkcí smíří podavači protestů při soutěžním létání.
Analýza a filtrace vibrací
Vibrace jsou nepřítelem všech zařízení s gyroskopy a akcelerometry. Tyto snímače nejsou schopny rozlišit, co jsou užitečné signály a co škodlivé vibrace například od motoru. Doposud se tento problém řešil umístěním stabilizačních systémů na pružné tlumící podložky a omezením vibrací. Systém Assist nám poskytuje další nástroj, analyzátor a filtr vibrací. Na obr. 10 vidíte zobrazení vibrací mé dremelky. Je krásně vidět, že maximum vibrací je v daných otáčkách brusky kolem 160Hz s šířkou pásma od 120 do 200Hz.

obr. 10: analýza vibrací
Nyní otevřu menu filtrů (obr. 11) a v něm potlačím tyto vibrace zadáním naměřených hodnot, tedy střední frekvenci filtrů 160Hz a šířku pásma 80Hz. No a tím jsem řekl Assistu, aby dělal, že tyto frekvence, a tím i vibrace, neexistují. Jak prosté! Nebo také můžeme použít dolní propust filtru a hodnotu „Potlačit frekvence nad“ (obr. 10) nastavit na 120Hz. Pak nebude Assist brát zřetel na všechny vibrace s frekvencí nad 120Hz. Pro informaci – nebezpečné vibrace pro funkci stabilizačního systému jsou takové, které přesahují 50% rozsahu stupnice a mají frekvenci nad 50Hz.
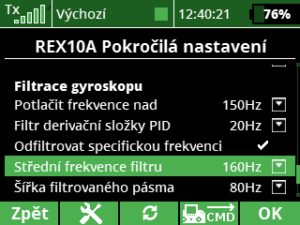
obr. 11: filtry vibrací
Samozřejmě nejlepší boj proti vibracím je jejich odstranění. A protože analyzátor vibrací pracuje v reálném čase, můžeme sledovat okamžitý vliv úprav jako vyvažování nebo tlumení přímo při spuštěném motoru na displeji počítače nebo vysílače. Takže začít bychom měli například vyvážením vrtule a motoru, instalací tlumící podložky pod přijímač a pružným uložením přívodních kabelů k přijímači. Elektronické filtry pak použít až na odstranění zbylých vibrací.
Telemetrie a další čidla
K přijímačům řady Assist je možné přímo, tedy bez expandéru, připojit až tři další telemetrická čidla dle vlastního výběru. Pro funkci stabilizačního systému jsou důležitá čidla poskytující data o rychlosti modelu. Pokud má Assist informace o rychlosti modelu, zahrnuje je do výpočtů, a celkový výsledek je pak mnohem lepší. To platí zejména u modelů s vysokým rozsahem rychlostí a hlavně při stabilizaci visení na vrtuli. V návodu se uvádí, že jako senzor rychlosti lze použít senzor MGPS, ten pomocí GPS měří rychlost modelu vzhledem k povrchu nebo MSPEED (obr. 12). To je klasická pitotova trubice, která měří správněji rychlost modelu vzhledem k okolnímu vzduchu. Zkoušel jsem úspěšně a bez problémů pouze MSPEED. MGPS podle mě nemůže vzhledem k pomalosti měření a chybám při vertikálním pohybu modelu dobře pracovat.
Pro přesné měření malých výšek a tím i stabilizaci při nízkých průletech se testuje použití ultrazvukového dálkoměru. Vzorek na obr. 13 umí měřit výšku s přesností na dva centimetry.
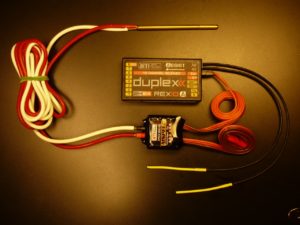
obr. 12: měřič rychlosti MSPEED s pitotkou připojený k přijímači REX10A
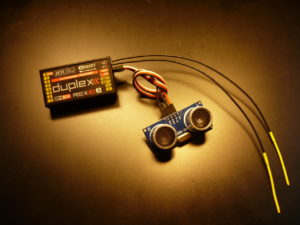
obr. 13: ultrazvukový výškoměr
Všechna telemetrická data lze, jak je to u Duplexu běžné, nejen zobrazovat v reálném čase, ale i zaznamenávat k pozdějšímu rozboru. Na obr. 14 je příklad zobrazení náklonů přijímače, tedy i modelu. Jak vidíte, dá se přijímač Assist použít nouzově i jako 3D úhloměr pracující s přesností na desetinu stupně a s možností záznamu naměřených hodnot.

obr. 14: zobrazení telemetrických dat o náklonu a přetížení
Pro nás modeláře bude určitě více důležitý první řádek na stejném obrázku s popisem G-síla. Ano, je to údaj aktuálního přetížení na palubě modelu. Konečně víme, jakých přetížení je skutečně dosahováno u našich modelů, a máme pravdivá data pro výpočty pevnosti konstrukce a spojovacích trubek.

obr. 15: graf průběhu přetížení
Na obr. 15 vidíte příklad grafu se záznamem průběhu přetížení. Špičkové přetížení bylo naměřeno 6,76G a kurzor je na hodnotě 1G, kdy byl přijímač již v klidu na zemi. Assist zvládne měřit přetížení až do 16G a teď, když nemusíte odhadovat, ale můžete měřit, budete překvapeni, jak vysokého přetížení je dosahováno u našich modelů. S ani ne metrovým polystyrénovým 3D akrobatem jsem se dokázal ve špičkách dostat přes 12G.
Umělý horizont
Nová řada přijímačů Assist dokáže získávat dostatek dat i pro aplikaci typu umělý horizont. Většině modelářů taková aplikace asi nechyběla, ale hezky funguje v reálném čase, dokáže být zábavná a je zdarma, tak proč ne.

obr. 16: umělý horizont
Okno umělého horizontu je na obr. 16. V centrálním čtverci je klasická grafika umělého horizontu jak ji známe z velkých letadel. Nechybí grafický ukazatel rychlosti, výšky a číselný údaj varia. Pouze ukazatel azimutu a kompas zatím nic nezobrazuje, jelikož v této řadě přijímačů Assist není integrovaný magnetometr.
JETI Studio
Jedná se o počítačový program, pomocí kterého můžeme načítat, ukládat a prohlížet data z přijímačů, čidel a dalších zařízení na palubě modelu. Z těchto dat si můžeme sestavovat přehledné grafy, okna a tabulky nebo umístit data do mapy. Umí toho ale podstatně víc, například emulovat vysílač, aktualizovat software výrobků JETI model a nastavovat tyto zařízení bez omezení malého displeje Jetiboxu nebo vysílače. A proto se zde o něm také zmiňuji. Pomocí JETI Studia si můžeme pohodlně natavit i přijímače řady Assist. Úvodní okno konfigurace je na obr. 17.
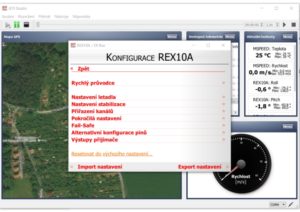
obr. 17: nastavování přijímače REX10A pomocí aplikace JETI Studio
Povšimněte si ve spodní liště dvou odkazů pro import a export nastavených údajů. Pomocí nich si můžeme zálohovat pracně a mnoha lety získané nastavení stabilizace a i celého konkrétního modelu. Tak také můžeme porovnávat a vybírat různé verze vyladění modelu a stabilizačního systému.
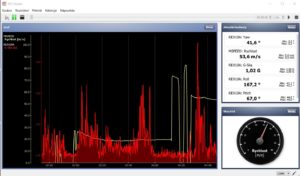
obr. 18: zobrazení záznamu přetížení pomocí grafu JETI Studia
Na obr. 18 jedno z mnoha možných oken k práci s naměřenými daty. Konkrétně zde je v levém grafu červeně zobrazeno přetížení a žlutě rychlost modelu, vpravo dole pak kruhový rychloměr.
Tento program je ke stažení na stránkách výrobce zdarma pro různé operační systémy a v různých jazykových verzích včetně češtiny.
Mirek Pastyřík, MDK Pohořelice